Workcell Builder¶
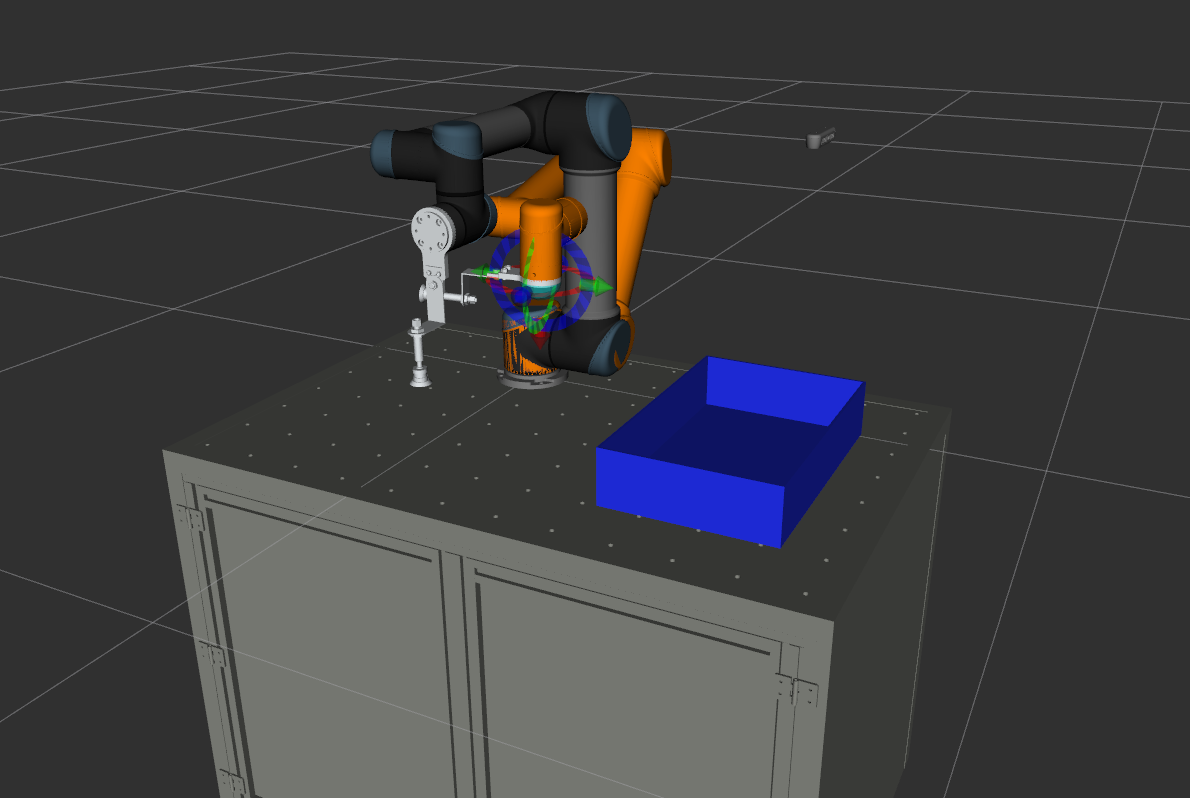
This ROS package provides an easy to use Graphical User Interface for generation of a robotic workcell in RViz which serves as the first step in the pipeline for a pick and place task
This ROS package provides an easy to use Graphical User Interface for generation of a robotic workcell in RViz which serves as the first step in the pipeline for a pick and place task