Grasp Planner Configuration¶
In order for the grasp planner to plan the right type of grasp, we need to first create a configuration file in the config folder , attributes.yaml . It is advised to write over the current attributes.yaml file to prevent any YAML parsing errors.
This File will be located in grasp_planner/config/attributes.yaml
Finger Gripper¶
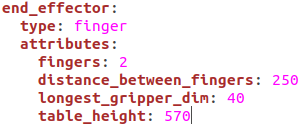
fingers¶
Number of fingers for the end effector. Currently only 2 fingered grippers are supported
distance_between_fingers¶
The distance between the fingers of the end effector(in mm). Using the Robotiq 2F-85 gripper as an example:
longest_gripper_dim¶
The longest dimensions of a finger (in mm). Using the robotiq 2F-85 gripper:
table_height¶
The distance between the camera used to capture the workspace and the surface on which the object is on.
min_zero_angle¶
Minimum angle (in radians) that can be regarded as 0 rad. Increase this value to increase planning speeds (but might result in a less desirable grasp)
min_height_diff_to_grip¶
Minimum height difference that can be gripped. Increase this to increase stability of grasps, but may lead to the grasp planner not finding any grasps if too high.
min_gdi_diff_for_comparison¶
Used to determine when centroid position is taken into comparison. Increasing this number increases the consideration of centroid grasp position compared to finger collision
Suction Gripper¶
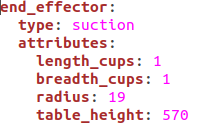
length_cups¶
The number of cups in the length dimension. Currently only support value of 1
breadth_cups¶
The number of cups in the breadth dimension. Currently only support value of 1
radius¶
The radius one of the suction cup.
table_height¶
The distance between the camera used to capture the workspace and the surface on which the object is on.